В цілому, стандартизація додатків HRC все ще знаходиться в процесі розвитку, і багато положень все ще дещо розпливчасті. Оцінка ризику, заснована виключно на метрологічних методах, також повинна досягати своїх меж, якщо послідовності рухів не фіксуються, а плануються автономно роботом або якщо робоче середовище часто змінюється. Проте в останні роки багато чого відбулося для того, щоб концепції безпеки роботів відповідали швидкому технологічному розвитку. Під терміном «Комп'ютерна безпека» дослідники та інженери розробляють нові методи та інструменти для планування безпечних додатків HRC.
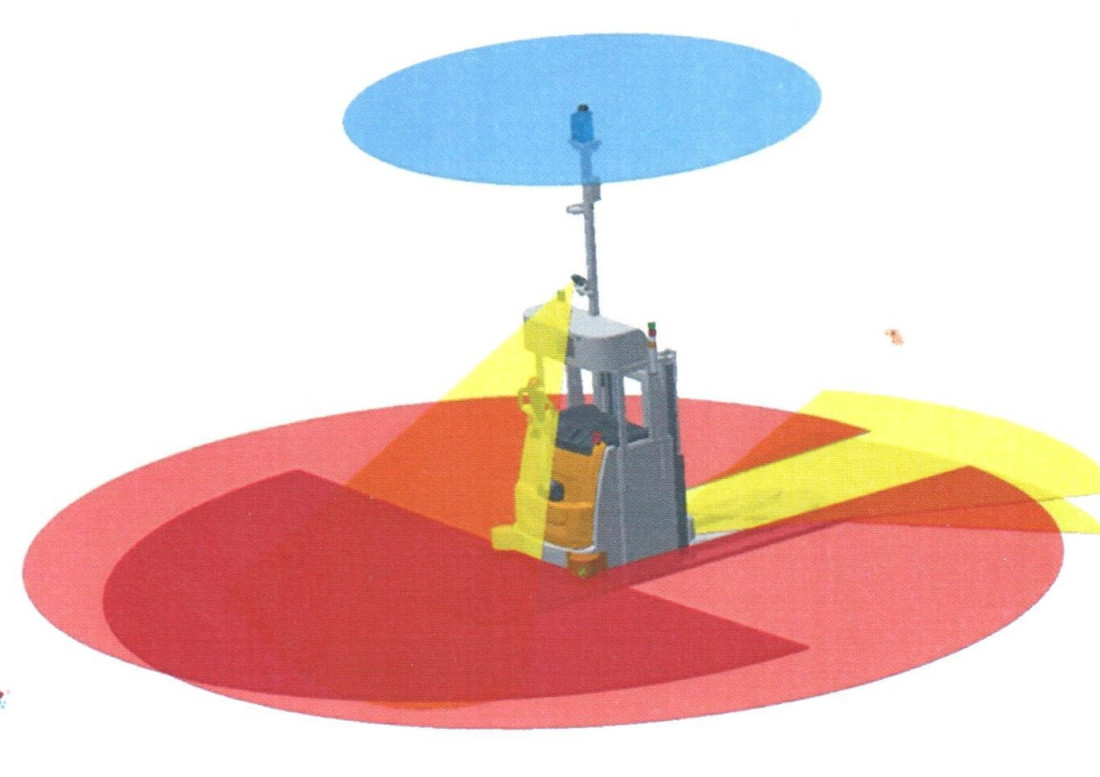
Застосування вищезазначених принципів захисту повинно дозволити людям і роботам безпечно взаємодіяти один з одним навіть без розділення захисних пристроїв. Як тільки обидва учасники використовують одне і те ж так зване простір для спільної роботи, позиції, рухи і швидкості людей і роботів повинні реєструватися безконтактно, за допомогою камер, ультразвуку або радара. Коли люди і машини рухаються автономно, звичайні захисні пристрої, такі як килимки або світлові бар'єри, можуть захистити від небажаних контактів. Такі захисні функції також все частіше інтегруються в власну сенсорну систему робота. Відповідні параметри, такі як сила, швидкість, тиск і імпульс рухомих частин робототехнічної системи, потім постійно контролюються датчиками, вбудованими в поверхню робота. Така сенсорна шкіра може негайно реагувати на наближення або дотик людини до неї.
Все більш потужні датчики, сигнали яких обробляються за допомогою штучного інтелекту, повинні дозволити роботам в майбутньому передбачати і «продумувати» ситуації, наприклад, включати затримки, такі як гальмівний шлях. Робот повинен не тільки своєчасно зупиняти небезпечний рух, але і, наприклад, адаптувати свій темп роботи до свого колеги-людини або незалежно реагувати на зміну робочого процесу.
Звичайно, роботизовані системи також повинні мати функції аварійної зупинки. Частина 1 стандарту EN ISO 10218 також вимагає блокуючих перемикачів режимів роботи або аналогічного рішення.
Крім того, еволюціонував дизайн роботів, особливо їх поверхні. Форми стали більш округлими і органічними, виключені гострі краї або точки, які можуть викликати біль і травми. Ризик травми також знижується за рахунок використання м'яких матеріалів або чохлів і прокладок з гнучких матеріалів, таких як гума або поролон, на елементах, звернених до людини. У випадку роботів по догляду, використовуваних для роботи з пацієнтами з деменцією, ця свобода дизайну заходить так далеко, що роботи моделюються на тваринах, таких як тюлені, і через їх м'яку і схожу на хутро поверхню практично неможливо відрізнити візуально і на дотик.
Цей активний і пасивний захист означає, що можна відмовитися від раніше поширених розділових захисних пристроїв, таких як оболонка, захисні решітки або герметизація. Це не тільки забезпечує більш гнучку роботу, але і скорочує простір, необхідний для виробничих приміщень. Також усунена проблема маніпулювання захисними пристроями, якої побоюються фахівці з охорони праці. Тому що там, де більше немає необхідності в розділовому захисному пристрої, співробітникам не потрібно розбирати цей захисний пристрій або виводити його з ладу будь-яким іншим способом, і немає ризику аварії.